最近在公司有點時間所以深入研究了下數(shù)據(jù)庫索引btree/b+tree數(shù)據(jù)結(jié)構(gòu)和原理,由此牽引出了好多問題,請看如下帶著問題研究。
1:為什么 btree/b+tree 數(shù)據(jù)結(jié)構(gòu)適合數(shù)據(jù)庫索引,它到底是怎么樣一個原理和結(jié)構(gòu)?
btree/b+tree 數(shù)據(jù)結(jié)構(gòu):
在之前的文章中我們介紹過AVL樹,紅黑樹,它們都屬于二叉樹,即每個節(jié)點最多只能擁有2個子節(jié)點,而B-tree(B樹)的每個節(jié)點可以擁有2個以上的子節(jié)點,所以我們簡單概括一下:B-tree就是一顆多路平衡查找樹,它廣泛應(yīng)用于數(shù)據(jù)庫索引和文件系統(tǒng)中。首先我們介紹一下一顆 m 階B-tree的特性,那么這個 m 階是怎么定義的呢?這里我們以一個節(jié)點能擁有的最大子節(jié)點數(shù)來表示這顆樹的階數(shù)。舉個例子,如果一個節(jié)點最多有 n 個key,那么這個節(jié)點最多就會有 n+1 個子節(jié)點,這棵樹就叫做 n+1(m=n+1)階樹。一顆 m 階B-tree包括以下5條特性:
- 每個節(jié)點最多有 m 個子節(jié)點
- 除根節(jié)點和葉子節(jié)點,其它每個節(jié)點至少有 [m/2] (向上取整的意思)個子節(jié)點
- 若根節(jié)點不是葉子節(jié)點,則其至少有2個子節(jié)點
- 所有NULL節(jié)點到根節(jié)點的高度都一樣
- 除根節(jié)點外,其它節(jié)點都包含 n 個key,其中 [m/2] -1 <= n <= m-1
這些特性可能看著不太好理解,下面我們會介紹B-tree的插入,在插入節(jié)點的過程中我們就會慢慢理解這些特性了。B-tree的插入比較簡單,就是一個節(jié)點至下而上的分裂過程。下面我們具體以一顆4階樹來展示B-tree的插入過程。
首先我們 插入 200,300,400,沒有什么問題,直接插入就好。
| 200 | 300 | 400 |
現(xiàn)在我們接著插入500,這個時候我們發(fā)現(xiàn)有點問題,根據(jù)定義及特性1我們知道一顆4階B-tree的每個節(jié)點最多只能有3個key,插入500后這個節(jié)點就有4個key了。
| 200 | 300 | 400 | 500 |
這個時候我們就需要分裂,將中間的key上移到父節(jié)點,左邊的作為左節(jié)點,右邊的作為右節(jié)點,如下圖所示:
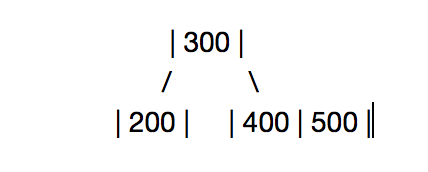 這個時候我們是不是就明白特性3了,如果根節(jié)點不是葉子節(jié)點,那么它肯定發(fā)生了分裂,所以至少會有2個子節(jié)點。同樣我們接著插入600,700,800,900插入過程如下圖所示:
這個時候我們是不是就明白特性3了,如果根節(jié)點不是葉子節(jié)點,那么它肯定發(fā)生了分裂,所以至少會有2個子節(jié)點。同樣我們接著插入600,700,800,900插入過程如下圖所示: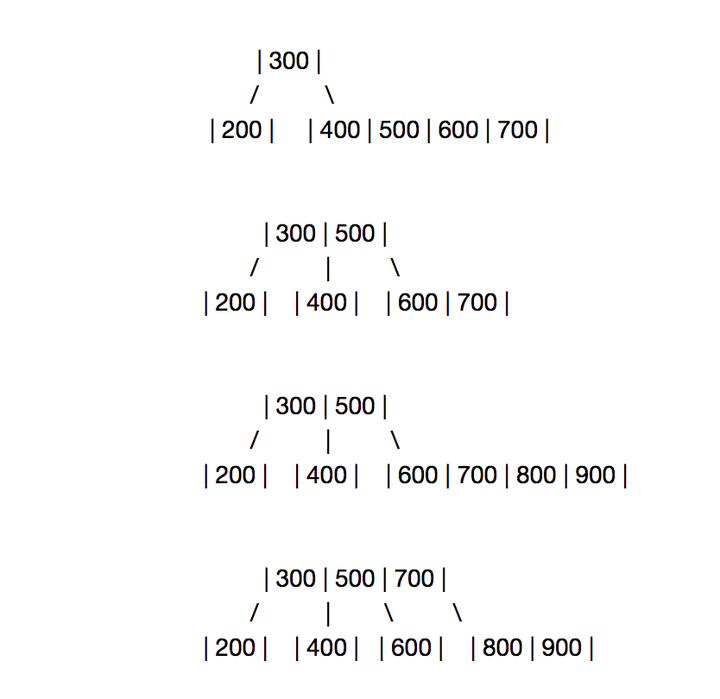 現(xiàn)在根節(jié)點也已經(jīng)滿了,如果我們繼續(xù)插入910,920,會怎樣呢?根節(jié)點就會繼續(xù)分裂,樹繼續(xù)向上生長。看下圖:
現(xiàn)在根節(jié)點也已經(jīng)滿了,如果我們繼續(xù)插入910,920,會怎樣呢?根節(jié)點就會繼續(xù)分裂,樹繼續(xù)向上生長。看下圖: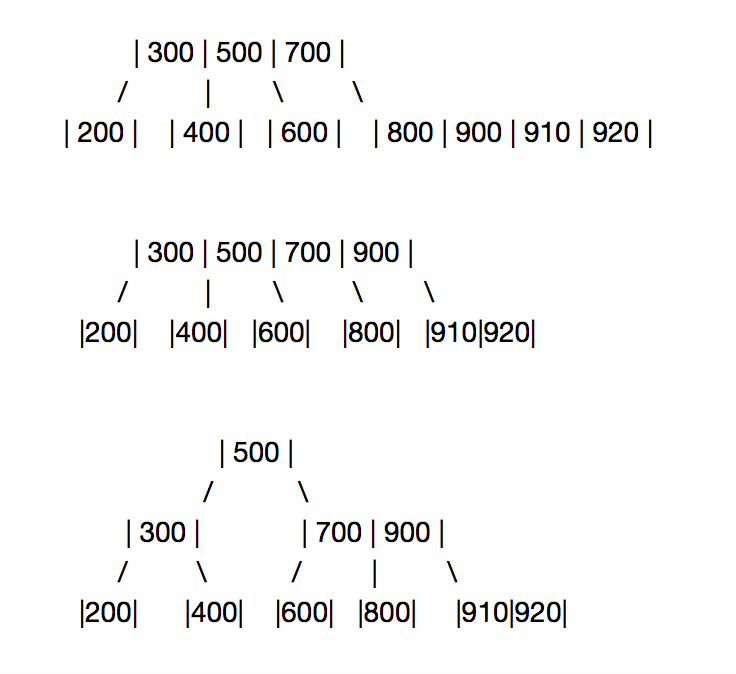
通過整個的插入過程我們也會發(fā)現(xiàn),B-tree和二叉樹的一個顯著的區(qū)別就是,B-tree是從下往上生長,而二叉樹是從上往下生長的。現(xiàn)在我們想想特性2和特性5是為什么?首先我們知道子節(jié)點的個數(shù)是等于key的數(shù)目+1,然后一個節(jié)點達(dá)到m個key后就會分裂,所以分裂后的節(jié)點最少能得到 m/2 - 1個key 。為啥還要減一呢?因為還要拿一個作為父節(jié)點。所以這個節(jié)點最少回?fù)碛?m/2 - 1 + 1 = m/2 個子節(jié)點。同樣得到特性5,因為最少有m/2個子節(jié)點,所以最少就含有m/2-1個key,m 階樹,每個節(jié)點存到了m個key就會分裂,所以最多就有 m-1個key。
根據(jù)以上特性我們能推出一棵含有N個總關(guān)鍵字?jǐn)?shù)的m階的B-tree樹的最大高度h的值,
樹的高度h: 1, 2, 3 , 4 ,.......... , h
節(jié)點個數(shù)s: 1, 2, 2*(m/2), 2*(m/2)(m/2), ........ ,2*(m/2)的h-2次方
s = 1 + 2(1 -  )/(1- (m/2))
)/(1- (m/2))
N = 1 + s * ((m/2) - 1) = 2 * () - 1
h = log┌m/2┐((N+1)/2 )+1
2:為什么btree/b+tree 為常用數(shù)據(jù)庫索引結(jié)構(gòu)?
上文說過,紅黑樹等數(shù)據(jù)結(jié)構(gòu)也可以用來實現(xiàn)索引,但是文件系統(tǒng)及數(shù)據(jù)庫系統(tǒng)普遍采用B-/+Tree作為索引結(jié)構(gòu),這一節(jié)將結(jié)合計算機(jī)組成原理相關(guān)知識討論B-/+Tree作為索引的理論基礎(chǔ)。
一般來說,索引本身也很大,不可能全部存儲在內(nèi)存中,因此索引往往以索引文件的形式存儲的磁盤上。這樣的話,索引查找過程中就要產(chǎn)生磁盤I/O消耗,相對于內(nèi)存存取,I/O存取的消耗要高幾個數(shù)量級,所以評價一個數(shù)據(jù)結(jié)構(gòu)作為索引的優(yōu)劣最重要的指標(biāo)就是在查找過程中磁盤I/O操作次數(shù)的漸進(jìn)復(fù)雜度。換句話說,索引的結(jié)構(gòu)組織要盡量減少查找過程中磁盤I/O的存取次數(shù)。下面先介紹內(nèi)存和磁盤存取原理,然后再結(jié)合這些原理分析B-/+Tree作為索引的效率。
主存存取原理
目前計算機(jī)使用的主存基本都是隨機(jī)讀寫存儲器(RAM),現(xiàn)代RAM的結(jié)構(gòu)和存取原理比較復(fù)雜,這里本文拋卻具體差別,抽象出一個十分簡單的存取模型來說明RAM的工作原理。
圖5
從抽象角度看,主存是一系列的存儲單元組成的矩陣,每個存儲單元存儲固定大小的數(shù)據(jù)。每個存儲單元有唯一的地址,現(xiàn)代主存的編址規(guī)則比較復(fù)雜,這里將其簡化成一個二維地址:通過一個行地址和一個列地址可以唯一定位到一個存儲單元。圖5展示了一個4 x 4的主存模型。
主存的存取過程如下:
當(dāng)系統(tǒng)需要讀取主存時,則將地址信號放到地址總線上傳給主存,主存讀到地址信號后,解析信號并定位到指定存儲單元,然后將此存儲單元數(shù)據(jù)放到數(shù)據(jù)總線上,供其它部件讀取。
寫主存的過程類似,系統(tǒng)將要寫入單元地址和數(shù)據(jù)分別放在地址總線和數(shù)據(jù)總線上,主存讀取兩個總線的內(nèi)容,做相應(yīng)的寫操作。
這里可以看出,主存存取的時間僅與存取次數(shù)呈線性關(guān)系,因為不存在機(jī)械操作,兩次存取的數(shù)據(jù)的“距離”不會對時間有任何影響,例如,先取A0再取A1和先取A0再取D3的時間消耗是一樣的。
磁盤存取原理
上文說過,索引一般以文件形式存儲在磁盤上,索引檢索需要磁盤I/O操作。與主存不同,磁盤I/O存在機(jī)械運動耗費,因此磁盤I/O的時間消耗是巨大的。
圖6是磁盤的整體結(jié)構(gòu)示意圖。
圖6
一個磁盤由大小相同且同軸的圓形盤片組成,磁盤可以轉(zhuǎn)動(各個磁盤必須同步轉(zhuǎn)動)。在磁盤的一側(cè)有磁頭支架,磁頭支架固定了一組磁頭,每個磁頭負(fù)責(zé)存取一個磁盤的內(nèi)容。磁頭不能轉(zhuǎn)動,但是可以沿磁盤半徑方向運動(實際是斜切向運動),每個磁頭同一時刻也必須是同軸的,即從正上方向下看,所有磁頭任何時候都是重疊的(不過目前已經(jīng)有多磁頭獨立技術(shù),可不受此限制)。
圖7是磁盤結(jié)構(gòu)的示意圖。
圖7
盤片被劃分成一系列同心環(huán),圓心是盤片中心,每個同心環(huán)叫做一個磁道,所有半徑相同的磁道組成一個柱面。磁道被沿半徑線劃分成一個個小的段,每個段叫做一個扇區(qū),每個扇區(qū)是磁盤的最小存儲單元。為了簡單起見,我們下面假設(shè)磁盤只有一個盤片和一個磁頭。
當(dāng)需要從磁盤讀取數(shù)據(jù)時,系統(tǒng)會將數(shù)據(jù)邏輯地址傳給磁盤,磁盤的控制電路按照尋址邏輯將邏輯地址翻譯成物理地址,即確定要讀的數(shù)據(jù)在哪個磁道,哪個扇區(qū)。為了讀取這個扇區(qū)的數(shù)據(jù),需要將磁頭放到這個扇區(qū)上方,為了實現(xiàn)這一點,磁頭需要移動對準(zhǔn)相應(yīng)磁道,這個過程叫做尋道,所耗費時間叫做尋道時間,然后磁盤旋轉(zhuǎn)將目標(biāo)扇區(qū)旋轉(zhuǎn)到磁頭下,這個過程耗費的時間叫做旋轉(zhuǎn)時間。
局部性原理與磁盤預(yù)讀
由于存儲介質(zhì)的特性,磁盤本身存取就比主存慢很多,再加上機(jī)械運動耗費,磁盤的存取速度往往是主存的幾百分分之一,因此為了提高效率,要盡量減少磁盤I/O。為了達(dá)到這個目的,磁盤往往不是嚴(yán)格按需讀取,而是每次都會預(yù)讀,即使只需要一個字節(jié),磁盤也會從這個位置開始,順序向后讀取一定長度的數(shù)據(jù)放入內(nèi)存。這樣做的理論依據(jù)是計算機(jī)科學(xué)中著名的局部性原理:
當(dāng)一個數(shù)據(jù)被用到時,其附近的數(shù)據(jù)也通常會馬上被使用。
程序運行期間所需要的數(shù)據(jù)通常比較集中。
由于磁盤順序讀取的效率很高(不需要尋道時間,只需很少的旋轉(zhuǎn)時間),因此對于具有局部性的程序來說,預(yù)讀可以提高I/O效率。
預(yù)讀的長度一般為頁(page)的整倍數(shù)。頁是計算機(jī)管理存儲器的邏輯塊,硬件及操作系統(tǒng)往往將主存和磁盤存儲區(qū)分割為連續(xù)的大小相等的塊,每個存儲塊稱為一頁(在許多操作系統(tǒng)中,頁得大小通常為4k),主存和磁盤以頁為單位交換數(shù)據(jù)。當(dāng)程序要讀取的數(shù)據(jù)不在主存中時,會觸發(fā)一個缺頁異常,此時系統(tǒng)會向磁盤發(fā)出讀盤信號,磁盤會找到數(shù)據(jù)的起始位置并向后連續(xù)讀取一頁或幾頁載入內(nèi)存中,然后異常返回,程序繼續(xù)運行。
B-/+Tree索引的性能分析
到這里終于可以分析B-/+Tree索引的性能了。
上文說過一般使用磁盤I/O次數(shù)評價索引結(jié)構(gòu)的優(yōu)劣。先從B-Tree分析,根據(jù)B-Tree的定義,可知檢索一次最多需要訪問h個節(jié)點。數(shù)據(jù)庫系統(tǒng)的設(shè)計者巧妙利用了磁盤預(yù)讀原理,將一個節(jié)點的大小設(shè)為等于一個頁,這樣每個節(jié)點只需要一次I/O就可以完全載入。為了達(dá)到這個目的,在實際實現(xiàn)B- Tree還需要使用如下技巧:
每次新建節(jié)點時,直接申請一個頁的空間,這樣就保證一個節(jié)點物理上也存儲在一個頁里,加之計算機(jī)存儲分配都是按頁對齊的,就實現(xiàn)了一個node只需一次I/O。
B-Tree中一次檢索最多需要h-1次I/O(根節(jié)點常駐內(nèi)存),漸進(jìn)復(fù)雜度為O(h)=O(logdN)。一般實際應(yīng)用中,出度d是非常大的數(shù)字,通常超過100,因此h非常小(通常不超過3)。
綜上所述,用B-Tree作為索引結(jié)構(gòu)效率是非常高的。
而紅黑樹這種結(jié)構(gòu),h明顯要深的多。由于邏輯上很近的節(jié)點(父子)物理上可能很遠(yuǎn),無法利用局部性,所以紅黑樹的I/O漸進(jìn)復(fù)雜度也為O(h),效率明顯比B-Tree差很多。
上文還說過,B+Tree更適合外存索引,原因和內(nèi)節(jié)點出度d有關(guān)。從上面分析可以看到,d越大索引的性能越好,而出度的上限取決于節(jié)點內(nèi)key和data的大小:
dmax = floor(pagesize / (keysize + datasize + pointsize)) (pagesize – dmax >= pointsize)
或
dmax = floor(pagesize / (keysize + datasize + pointsize)) - 1 (pagesize – dmax < pointsize)
floor表示向下取整。由于B+Tree內(nèi)節(jié)點去掉了data域,因此可以擁有更大的出度,擁有更好的性能。
這一章從理論角度討論了與索引相關(guān)的數(shù)據(jù)結(jié)構(gòu)與算法問題,下一章將討論B+Tree是如何具體實現(xiàn)為MySQL中索引,同時將結(jié)合MyISAM和InnDB存儲引擎介紹非聚集索引和聚集索引兩種不同的索引實現(xiàn)形式。